Publication: Miniaturized circuitry for capacitive self-sensing and closed-loop control of soft electrostatic transducers [PDF] [BIB]
Authors: Khoi Ly, Nicholas Kellaris, Dade McMorris, Brian K Johnson, Eric Acome, Vani Sundaram, Mantas Naris, J Sean Humbert, Mark E Rentschler, Christoph Keplinger, Nikolaus Correll
Submission: Soft Robotics, 2020
Abstract
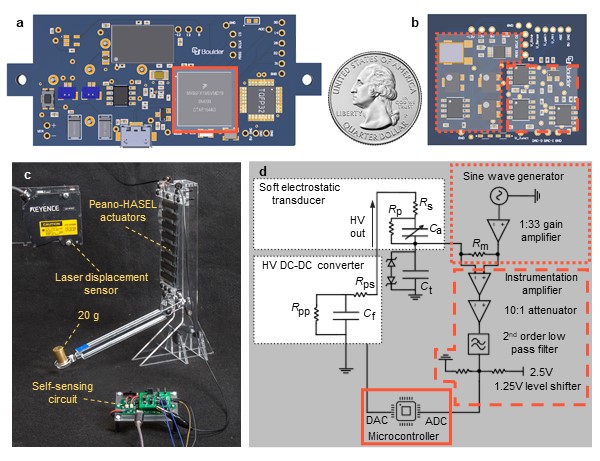
Soft robotics is a field of robotic system design characterized by materials and structures that exhibit large-scale deformation, high compliance, and rich multifunctionality. The incorporation of soft and deformable structures endows soft robotic systems with the compliance and resiliency that makes them well-adapted for unstructured and dynamic environments. While actuation mechanisms for soft robots vary widely, soft electrostatic transducers such as dielectric elastomer actuators (DEAs) and hydraulically amplified self-healing electrostatic (HASEL) actuators have demonstrated promise due to their muscle-like performance and capacitive selfsensing capabilities. Despite previous efforts to implement self-sensing in electrostatic transducers by overlaying sinusoidal low-voltage signals, these designs still require sensing high-voltage signals, requiring bulky components that prevent integration with miniature, untethered soft robots. We present a circuit design that eliminates the need for any high-voltage sensing components, thereby facilitating the design of simple, low cost circuits using off-the-shelf components. Using this circuit, we perform simultaneous sensing and actuation for a range of electrostatic transducers including circular DEAs and HASEL actuators and demonstrate accurate estimated displacements with errors under 4%. We further develop this circuit into a compact and portable system that couples HV actuation, sensing, and computation as a prototype towards untethered, multifunctional soft robotic systems. Finally, we demonstrate the capabilities of our self-sensing design through feedback-control of a robotic arm powered by Peano-HASEL actuators.
Slides
The below slides are for the detailed design, characterization, and application of the miniaturized capacitive self-sensing technique for electrostatic actuators:
This Project describes the capacitive self-sensing technique NOTE: Flash Player required - it won't work on mobile!