Publication: A multifunctional soft robotic shape display with high-speed actuation, sensing, and control [PDF] [BIB]
Authors: Brian. K. Johnson, Mantas Naris, Vani Sundaram, Angie Volchko, Khoi Ly, Shane K. Mitchell, Eric Acome, Nicholas Kellaris, Christoph Keplinger, Nikolaus Correll, James S. Humbert, and Mark E. Rentschler
Submission: Nature Communications, 2023
Abstract
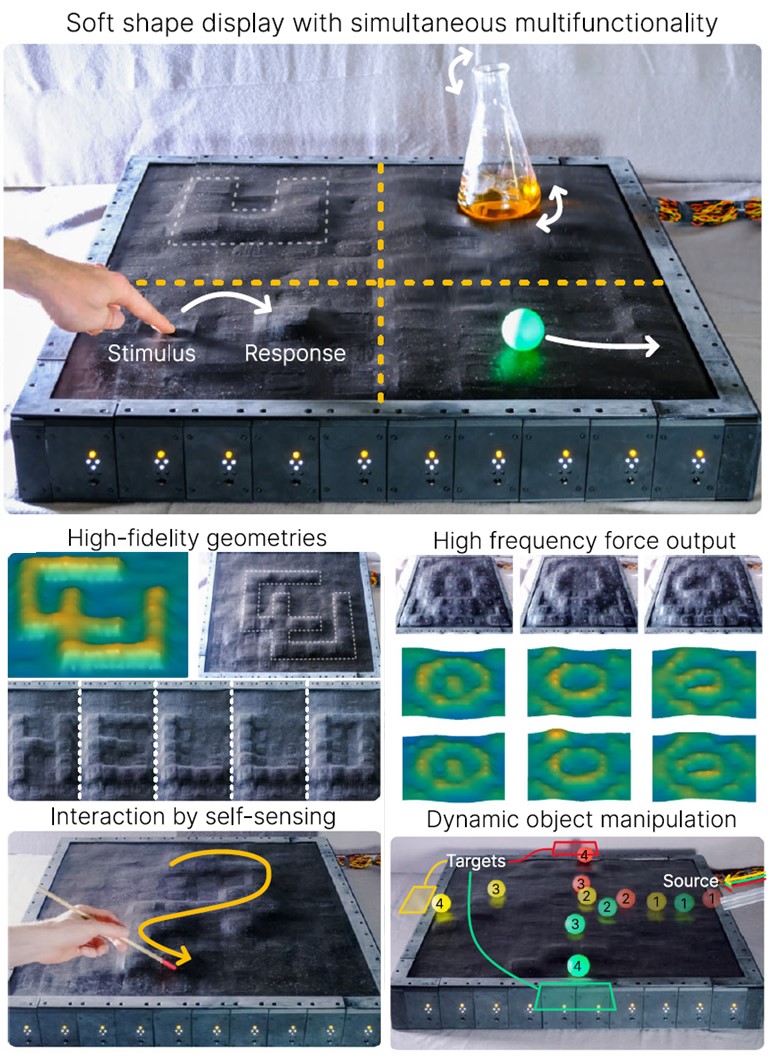
Shape displays which actively manipulate surface geometry are an expanding robotics domain with applications to haptics, manufacturing, aerodynamics, andmore. However, existing displays often lack high-fidelity shape morphing, high-speed deformation, and embedded state sensing, limiting their potential uses. Here, we demonstrate a multifunctional soft shape display driven by a 10 × 10 array of scalable cellular units which combine high-speed electrohydraulic soft actuation, magnetic-based sensing, and control circuitry. We report high-performance reversible shape morphing up to 50 Hz, sensing of surface deformations with 0.1mm sensitivity and external forces with 50mN sensitivity in each cell, which we demonstrate across a multitude of applications including user interaction, image display, sensing of object mass, and dynamic manipulation of solids and liquids. This work showcases the rich multifunctionality and high-performance capabilities that arise from tightlyintegrating large numbers of electrohydraulic actuators, soft sensors, and controllers at a previously undemonstrated scale in soft robotics.
Manuscript
The below paper is for the detailed description of the multifunctional soft robotic shape display driven by 10x10 electrohydraulic actuators
NOTE: Flash Player required - it won't work on mobile!